A need-knower in the Berkeley community with hypermobility and osteoarthritis was interviewed to derive project constraints and goals. She is a middle-aged woman with hobbies that center around working with her hands. She states that grip strength and dexterity is not an issue, but fatigue from gradual overexertion of her hands decreases quality of life.
We identify a project from this that can be boiled down to several goals:
1) Device must measure key indicators of hand activity
2) A control algorithm must cumulate this hand activity and warn the user ahead of experienced pain
3) This warning must be easily identifiable, preferably visual and tactile
2) Device must be as non-intrusive as possible to allow for precise activity of the fingers
3) Device must be product-representative

Video below is a final video submission for the project.
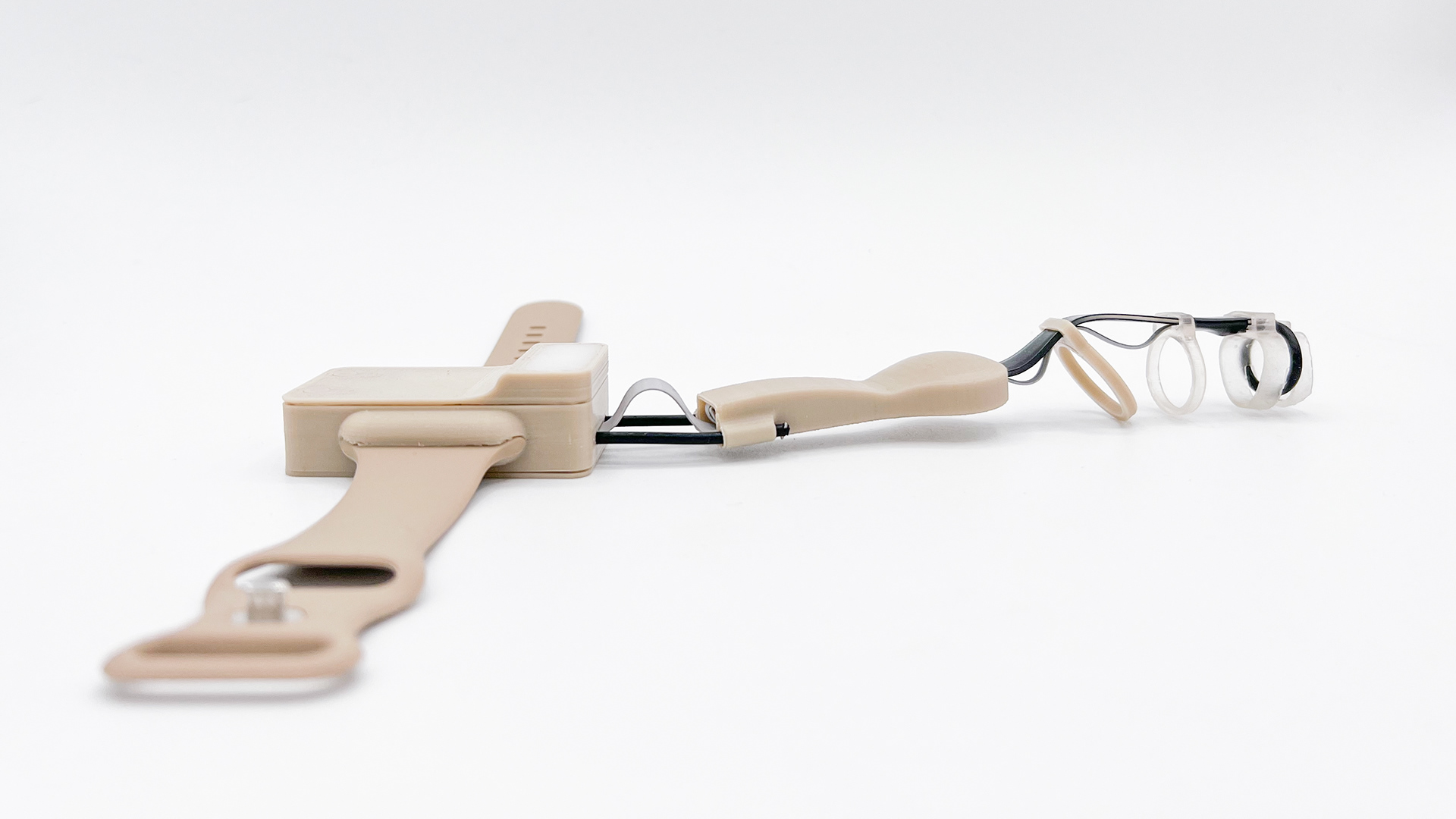
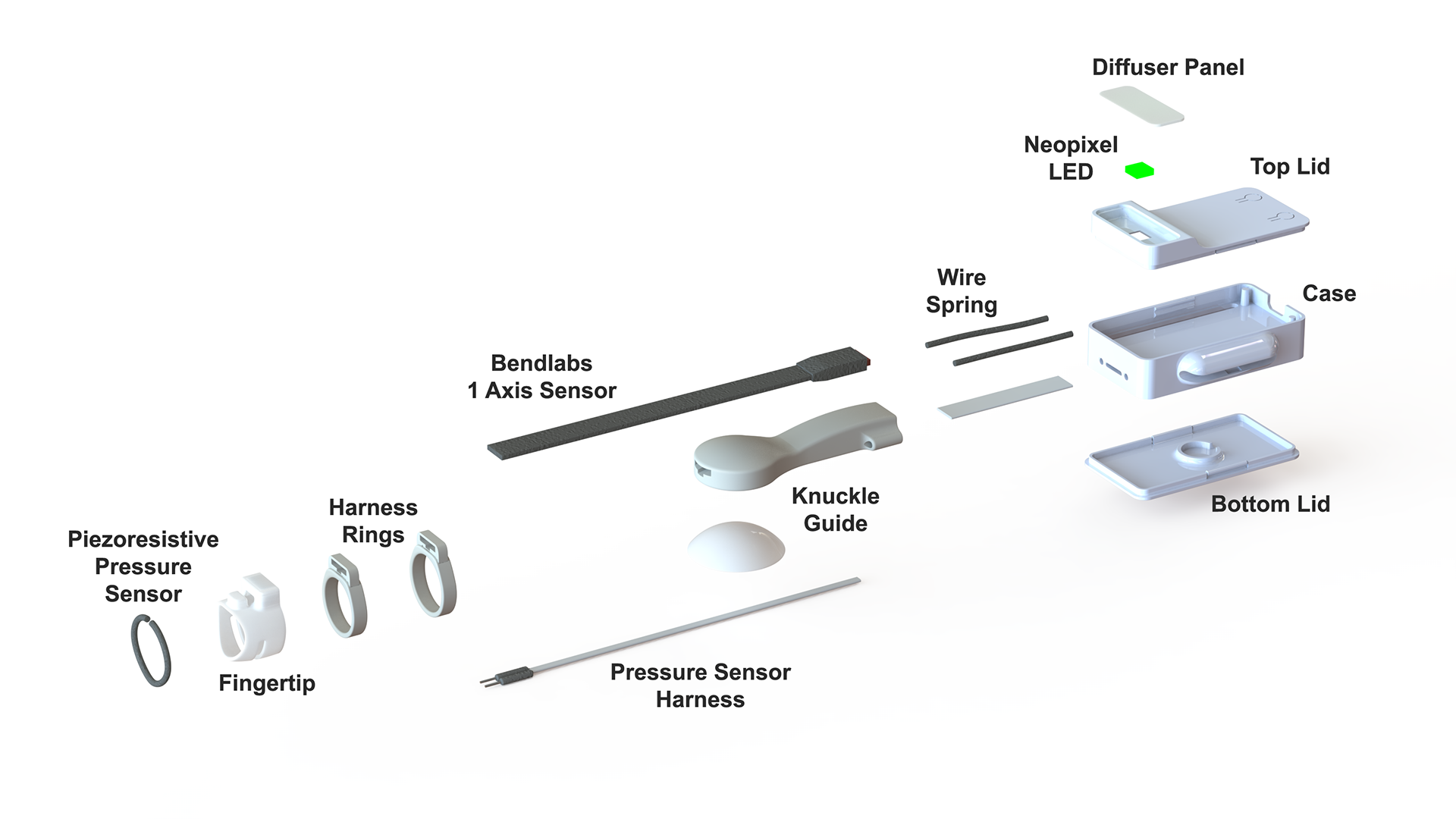
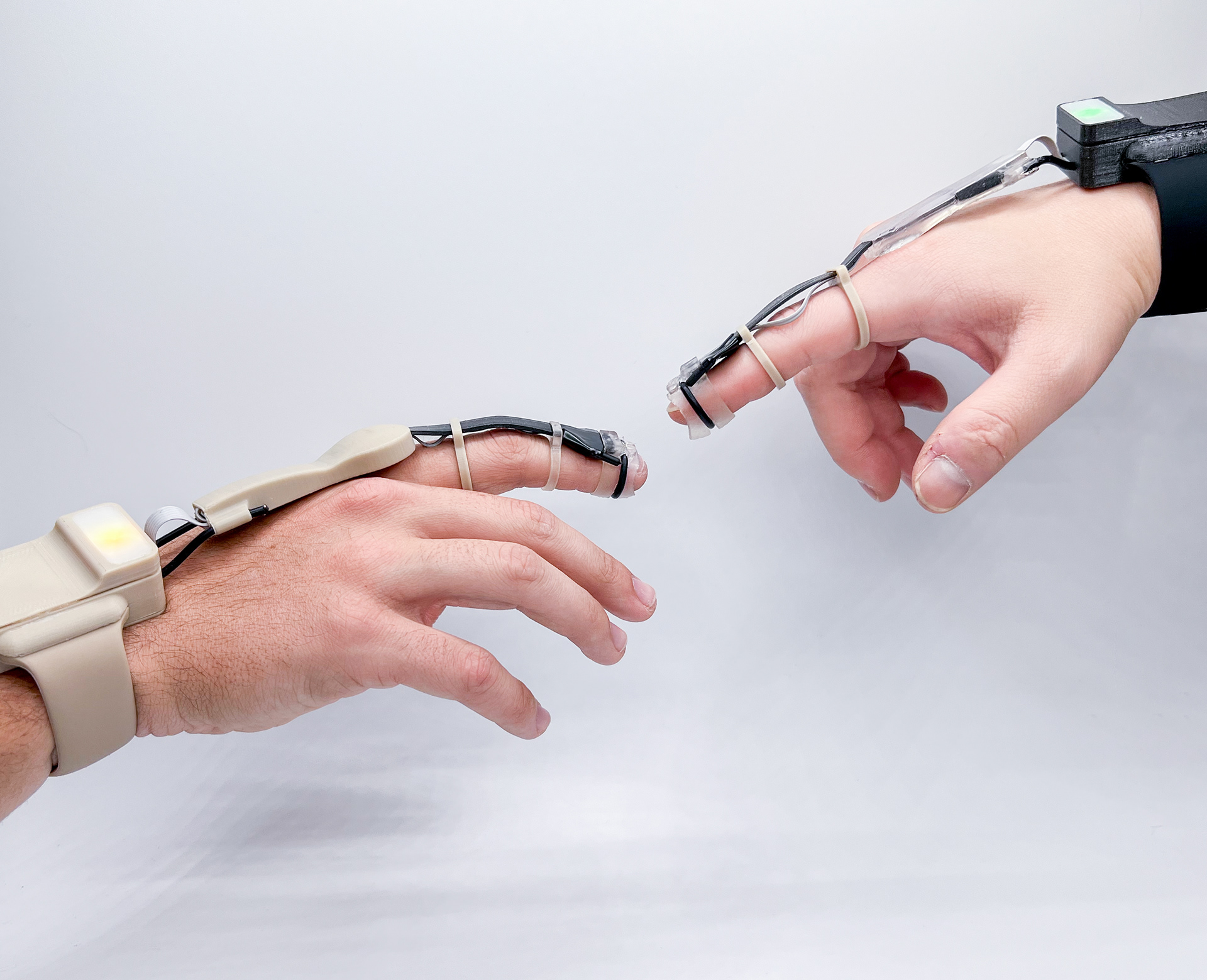
This product utilizes two primary sensors for measuring hand activity. The first sensor is a Bendlabs 1 Axis soft flex sensor, measuring angle of finger linkages along finger length. This is the long, skinny black sensor running along the top of the finger. The second sensor is a piezoresistive pressure sensor, which varies resistance based on experienced strain of conductive cordage. This variable resistance can be tuned to correlate with experienced pressure on the fingertip. The black rubberband-like cord around the fingertip is the piezoresistive material.
The control algorithm measures different forms of activity based on readouts from both sensors and assigns weights to these readouts depending on the user profile. This product can be used by patients with varying hand/finger disabilities with different activities causing pain, which can be tuned with user profiles. The two factors contributing to the cumulative function are:
1) Heightened average acceleration of the finger, caused by articulating the finger back and forth quickly and repeatedly. Measured through integrating position and velocity of finger based on flex sensor.
2) Torque experienced by finger, caused by load applied on the fingertip with the finger at a known angular position from the flex sensor. Depending on finger articulation position, varying gain is applied to pressure and subsequent calculated load experienced by piezoresistive sensor on the fingertip.
Both of these activities were mentioned in the original interview with our need-knower as causes for eventual discomfort.

Extremely tight, flexible, and robust sensor integration was a highlighted challenge of this project. Water resistance was considered and attempted to be implemented. Due to the prototyping nature of the project, it is likely the seals that were accomplished will disintegrate with time.

Notice the minimal impact of this device on the user's functional side of their hand. Anybody who wears rings will be familiar with this level of interference, which is minimal. Designing flexible harnessing for the sensors that were able to achieve similar ranges of motion as fingers was particularly difficult and mostly achieved.

Control system and power supply designed to fit in Apple Watch-esque wrist housing (complete with Apple Watch wrist strap compatibility built in). Last minute incompatibility between Bendlabs sensor and microcontroller forced use of different, larger microcontroller and incompatible power supply.
This project ultimately won "Best Prototype" award at the end of year gala for the class and is now an example demonstration project for future years for the professor.